Mars Curiosity rover success depends on 'crazy' landing
- Published
- comments
Project architect Adam Steltzner explains how the Mars Curiosity rover is expected to land on Mars (animation is courtesy of Nasa)
"The average person on the street thinks it's crazy. Even the team that's working [on] it - sometimes we think it's crazy."
Adam Steltzner is responsible for getting Nasa's $2.5bn Curiosity rover mission to the surface of the Red Planet on Monday 6 August.
This mobile Mars Science Laboratory (MSL) should bring about a revolution in our understanding of the geological history of the planet… provided it can land safely.
Steltzner and his team have devised a breathtaking approach to the problem that involves a rocket-powered crane.
"It's so ambitious, it's so audacious, it's so unconventional. It doesn't feel like there's a lot of shelter," he tells the BBC's Horizon programme.
"You can't say, 'Oh, I'm doing what they did before and, oh, it just didn't work out; I didn't get lucky'.
"No, we're not doing what we did before. We're doing something completely novel, hanging it way out there. You feel exposed."
But although Steltzner admits to the odd moment of panic in the middle of the night, he and his team actually have high confidence they can pull this one off.
"Reasoned engineering thought," he says, will get them through the white-knuckle ride that is entry, descent and landing - or EDL.
This is how the drama will unfold.
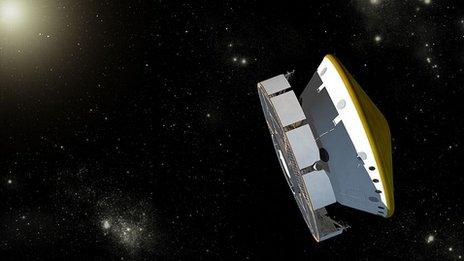
The 900kg rover will approach Mars enclosed in a protective capsule - the biggest capsule Nasa has ever used, bigger even than the Apollo Command Module.
It will arrive at the top of the atmosphere travelling 20,000km/h.
All that energy has got to be dumped. When the rover's wheels touch the ground six-to-eight minutes later, they must be moving no more than about 1m/s.
What scares the uninitiated most perhaps is the complexity of it all.
It starts with very precise navigation through space.
If the rover has any chance of reaching its equatorial target of Gale Crater, it must first hit an "entry keyhole" in the sky just a few kilometres across.
As the capsule thunders downwards, it ejects ballast blocks to move its centre of gravity and tilt its angle of attack.
This will give the vehicle lift. And with the aid of thrusters and some dead-reckoning, the entry capsule will fly a path through the upper atmosphere.
The underside of the capsule will get hot as it pushes up against the Martian air - the heat shield will experience temperatures above 2,000C.
More ballast blocks are then ejected to straighten the vehicle before, at 11km altitude and with the descent velocity now reduced to 1,400km/h, the capsule deploys a supersonic parachute.
This immense canopy will open instantaneously and must absorb an impulse of almost 30 tonnes.
Half a minute later, what is perhaps the most important event occurs - the separation of the heat shield.
Unless it comes off, Curiosity's descent radar cannot see the ground.
"The radar is fundamental," says Matt Wallace, the flight system manager on the project.
"You have to land softly or else you'll break the rover. To land softly, you have to know how high you are, obviously, from the ground. But more importantly you have to know how fast you are going - both vertically and horizontally.
Nasa's Matt Wallace: The radar system is very precise and doesn't get spoofed
"It's a pulsed-Doppler system and has the benefit of being extremely accurate in both velocimetry and altimetry, and it's very hard to fool."
The parachute will further slow the fall to about 450km/h, and it's at that point, at an altitude of about 1.5km, that we see the so-called "crazy" stuff.
A "sky crane" holding the rover drops away from the parachute, using thruster rockets to further slow its descent as it heads down towards the surface.
At just 20m above the ground, the sky crane hovers and lowers the rover down to the surface on three nylon cords.
Once the wheels make contact, the cords are cut, and the crane flies away to crash at a safe distance. Steltzner and his crew can breathe again.
All of this is automated; it's all pre-programmed. Earth and Mars are so far apart (250 million km) that communications links endure a 14-minute delay. Mission Control cannot intervene as if this were some online computer game.
My favourite number in this drama concerns the quantity of pyrotechnic devices.
These initiate key events, such as the severing of the nylon bridles or the opening of the chute housing.
All must blow - and in sequence - to ensure success. The number is 76.
Step by step: How the Curiosity rover will land on Mars

As the rover, tucked inside its protective capsule, heads to Mars, it dumps the disc-shaped cruise stage that has shepherded it from Earth.

The capsule hits the top of the atmosphere at 20,000km/h. It ejects ballast blocks and fires thrusters to control the trajectory of the descent.

Most of the entry vehicle's energy is dissipated in the plunge through the atmosphere. The front shield heats up to more than 2,000C

The parachute deploys when the capsule is about 11km above the ground but still moving at supersonic speed.

A key event is the dropping of the heat shield. This permits imaging and radar instruments to monitor the approaching surface.

At about 1.5km above the ground and still moving at 80m/s, the rover and its sky crane drop away from the parachute and capsule backshell

Rockets on the sky crane slow the descent to 1m/s. Nylon cords spool the rover to the surface. Untethered, the crane flies to a safe distance and crashes.

The rover is equipped with a nuclear battery and should have ample power to keep rolling across the Martian surface for many years.
But if all of this does sound a bit crazy, there is purpose.
We've grasped most of all there is to know about the simple geological history of Mars.
To deepen our understanding necessitates taking more sophisticated instrumentation to harder-to-reach places.
That means a bigger rover and a more robust landing system that can put down on the proverbial sixpence.
Consider all the surface missions Nasa has sent to the Red Planet, from the Vikings in the 1970s to the Phoenix probe in 2008.
Sanjeev Gupta: Gale crater rock layers could record 'ancient environments on Mars'
Each has had a more accurate landing system than its predecessor, but only with Curiosity's EDL technology could you confidently attempt to get inside Gale Crater, one of the deepest holes on Mars.
"Scientists want to go to somewhere rough because that's where the rocks are exposed. The engineers in the past wanted to go somewhere flat where their machines would be preserved," explains Prof Sanjeev Gupta, a Imperial College London-UK, external researcher on the Curiosity science team.
"But we've now moved on to the next stage. Issues of life and habitability are really locked in the rock record, and to see those rocks you need to go to canyons and mountains - to get the chronology, to see the relationships and understand past climate changes.
"You won't get that on flat plains."

Engineers define an ellipse in which they can confidently land
Viking's ellipse was 300km across - wider than Gale Crater itself
Even Phoenix (100km by 20km) could not confidently fit in Gale
Curiosity's landing system allows it to target the crater floor
Curiosity is due to land on Mars at about 06:30 BST (05:30 GMT) on Monday 6 August.
Horizon: Mission to Mars is on BBC Two at 21:00 BST on Monday 30 July
- Published16 July 2012

- Published12 June 2012
- Published25 May 2012

- Published15 March 2012

- Published6 March 2012
- Published12 January 2012
- Published26 November 2011

- Published24 November 2011




