Rosetta mission: Comet landing gets green light
- Published

The latest analysis sees no reason to change from the choice of Site J
The decision to try to land a robot on Comet 67P/Churyumov-Gerasimenko on 12 November has been confirmed.
Last month, planners on Europe's Rosetta mission announced a preference for a touch-down location on the head of the icy, rubber-duck-shaped object.
A detailed follow-up analysis, informed by new high-resolution pictures, has found no reason to rescind the choice.
The Rosetta probe will eject the Philae robot shortly after 08:30 GMT on the day of landing.
The shove will be imparted at a distance of about 20km from the surface of 67P.
The descent to the 4km-wide comet is expected to take about seven hours. Success or failure will be known roughly 30 minutes after that.
This additional period is the length of time a radio signal takes to travel 509 million km - the separation between 67P and Earth in mid-November.
Final confirmation of the touchdown sequence and location was given by the Lander Operations Readiness Review, which met at the European Space Agency's mission control in Darmstadt, Germany, on Tuesday.
"Now that we know where we are definitely aiming for, we are an important step closer to carrying out this exciting - but high-risk - operation," said Fred Jansen, Esa's Rosetta mission manager, in a statement.
"However, there are still a number of key milestones to complete before we can give the final 'go' for landing."
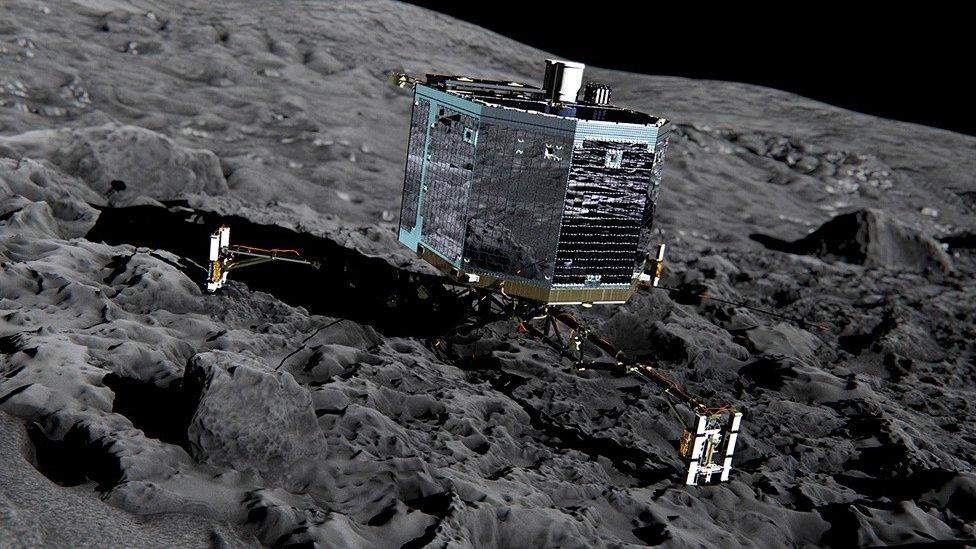
David Shukman takes a close-up look at the Philae lander
Rosetta is currently manoeuvring itself into a circular 10km-high orbit around the comet.
This will permit even more detailed pictures of the landing zone - known at present simply as Site J - to be acquired.
These images will be able to pick out features that are just 19cm across.
This may give controllers some additional information as they approach the hazardous venture ahead.
On 28 October, Rosetta will be commanded to start "phasing" its orbit ready for landing.
This involves, in the first instance, raising its altitude to 30km.
On the day of landing, the probe will essentially dive-bomb the comet, to be sure of putting Philae on exactly the right path to contact the middle of Site J.
Then, shortly after release, Rosetta will perform a sharp turn, taking itself away from 67P and on to a trajectory that allows it to maintain permanent radio contact with the robot lander.
The rest will be down to physics - and a large slice of luck.
To succeed, Philae will have to miss some sizeable cliffs and boulders.

The Site J region seen from 30km: It contains sizeable cliffs and boulders
Little is known about the composition and strength of the comet's surface layers, and the fear is that the robot could simply bounce off 67P in what will be a very low-gravity environment.
Foot-screws and harpoons will be deployed at the moment of touchdown to try to ensure that does not happen.
Tuesday's confirmation sets in train a sequence of decision points that will each require a "go/no-go" from Darmstadt's controllers.
If at any of these key moments, the mission team is unhappy with progress, or with the status of Rosetta and Philae, it can call a "hold" in the timeline.
The sequence to touchdown would then be revised depending on the resolution of any problem.
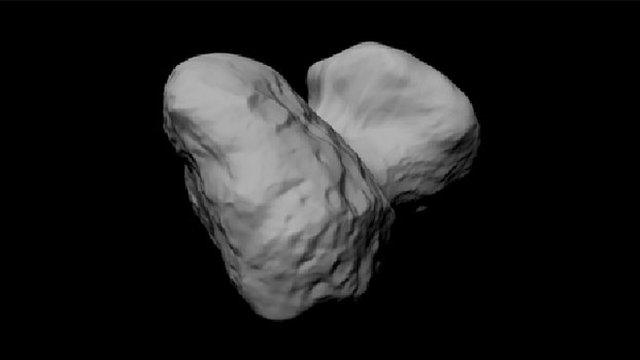
Comet 67P/Churyumov-Gerasimenko

Named after astronomers Klim Ivanovych Churyumov and Svetlana Ivanovna Gerasimenko who first identified the object in 1969
Perturbed into the inner Solar System, it is now a "Jupiter class" comet that takes 6.45 years to complete one full circuit of the Sun
Its orbital path brings it as close as 180 million km from our star (inside Mars' orbit), and sweeps it out as far as 840 million km
The icy core, or nucleus, is about 4km across (the largest dimension on the bigger of the lobes) and takes 12.4 hours to rotate
Sensing its gravitational tug, Rosetta has measured Comet 67P to have a mass of roughly 10 billion tonnes, or a trillion kilograms
The published volume is 25 cubic kilometres, which gives it a bulk density of 400kg per cubic metre - similar to some woods
Jonathan.Amos-INTERNET@bbc.co.uk and follow me on Twitter: @BBCAmos, external
- Published14 October 2014

- Published3 October 2014
- Published26 September 2014
- Published15 September 2014
- Published11 September 2014

- Published21 August 2014
- Published7 August 2014





