Game-on for UK's Team Tao in ocean XPRIZE final
- Published

Team Tao's USV: Technologies have had to be developed in just three years
A UK-based team has arrived in Greece for the grand final of a contest to find innovative solutions for seafloor mapping.
The Shell Ocean Discovery XPRIZE, external competition is offering multi-million dollar awards for the best concepts.
Participants have to chart at least 250 sq km of the Mediterranean at depths down to 4,000m, all inside 24 hours.
Team Tao, external, from Newcastle in the north of England, has developed a novel, low-cost, underwater robot.
Deployed and collected by an un-crewed surface vessel (USV), this torpedo-like device is called a BEM, or Bathypelagic Excursion Module. The name is a reference to the Lunar Excursion Module that put the Apollo astronauts on the Moon.
The BEM has been built using a lot of off-the-shelf components, but has been tested in a pressure chamber to ensure it can handle the crushing forces at depth.

The BEM will ultimately be deployed in swarms to map larger areas
The robot is programmed to rise and fall through the water column, tracing a line across the seabed and using its sonar to record its shape. It carries a camera to photograph things it sees, and can be fitted with sensors to record seawater conditions.
Once the BEM's mapping cycle is complete, the robot returns to the surface where it is scooped up by the USV and brought back to shore.
Team Tao will have several days of testing off Kalamata before entering the competition zone, possibly around the 13th or 14th of the month.
Fugro, the big international geophysical survey company, and a partner on the XPRIZE competition, has already made a baseline map of a 500 sq km area at the bottom of the Mediterranean. The British team's efforts will be judged on how well it is able to replicate the Fugro data.

Ocean Discovery XPRIZE rules for final

Some of the deepest waters in the Mediterranean are off the Greek coast
Map an area of 500 sq km at 4,000m depth
Time limit of 24hrs from entering map zone
Teams must map at least 50% of this area
Resolution: 5.0m horizontal, 0.5m vertical
Image 10 features, eg. archaeological/geological
Top prize of $5m; $1m for second place
The Shell Ocean Discovery XPRIZE was launched in December 2015, which means finalists have not had long to develop their ideas. And Team Tao's leader, Dale Wakeham, concedes his group's concept is not quite at the stage of maturity it would have ideally liked.
"Winning at the grand prize final for us is about proving the capabilities of our system," he told BBC News.
"We have a lot of firsts, and what we want to show is that for the map we do create - we can do it at a price point that is an order of magnitude lower than what traditional equipment can achieve. Within another six months, we expect to be able to scale up. Ultimately, our 20ft vessel will be able to deploy and recover four BEMs at a time."
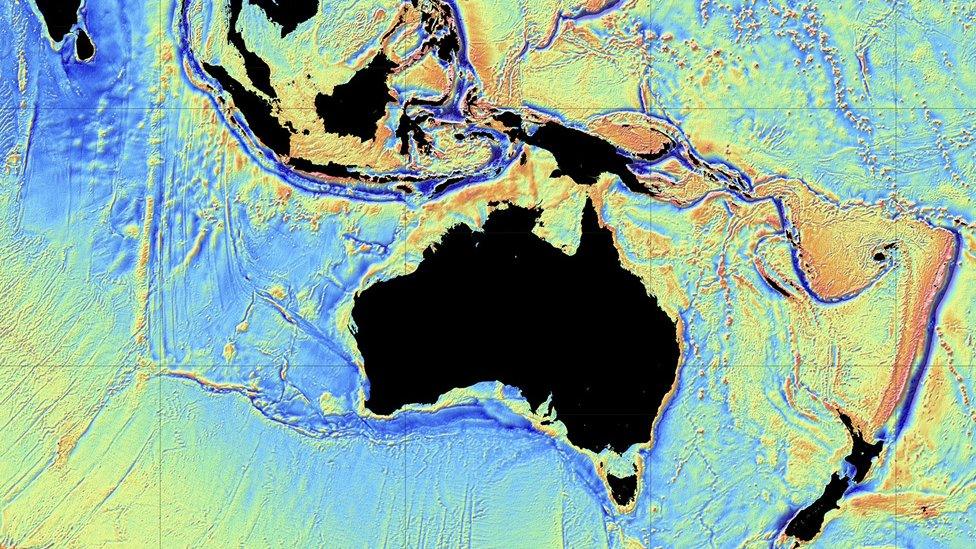
Less than 20% of the global ocean floor has been mapped to a meaningful level of precision. Most of our knowledge of seabed topography has been derived from a low-resolution gravity interpolation of the shape of the ocean surface, acquired by satellites. The poor coverage reflects partly the scale and difficulty of the task, but also has a lot to do with cost.
Team Tao has produced a video to explain its seafloor mapping concept
Many of the current technologies used in ocean-bottom mapping are very expensive. TeamTao, and the other competitors in the XPRIZE, are trying to break this price bottleneck.
The ocean community - scientific and industrial - has set itself a target to map the entire ocean floor to an acceptable standard by 2030. That will require higher investment, but likely also quite a few of the new approaches being demonstrated in the XPRIZE competition.
"The concept we have put forward is of 'cubesats for the ocean'," said Dale Wakeham. "We're using this competition to show people what the future of subsea surveying looks like.
"This is a start point for us. The finish line is commercialising the pioneering capabilities of our system."
Team Tao is a joint venture between Soil Machine Dynamics Ltd (SMD), external, which makes large subsea vehicles, and Newcastle University.

Most of what we know is the result of low-resolution satellite mapping
Jonathan.Amos-INTERNET@bbc.co.uk, external and follow me on Twitter: @BBCAmos, external
- Published9 October 2018
- Published13 September 2018

- Published7 March 2018
- Published17 June 2016

- Published2 October 2014