Bloodhound diary: Racing at over 500mph
- Published

Testing, testing…
A British team is developing a car that will be capable of reaching 1,000mph (1,610km/h). Powered by a rocket bolted to a Eurofighter-Typhoon jet engine, the vehicle aims to show its potential by going progressively faster, year after year. Current high-speed trials have seen Bloodhound, external top 500mph. The next step would be to break the existing world land speed record (763mph; 1,228km/h). The racing is conducted on Hakskeen Pan in Northern Cape, South Africa.
Wow, what a month!
October started quietly enough. While the car was being shipped 5,500 miles south, most of the team went home and wondered what to pack for our desert adventure.
Then we deployed out to the Northern Cape of South Africa and the whirlwind began.
The car was quickly unloaded and the workshop set up, ready for our first test runs.
First up was a static engine run to prepare the jet for the coming onslaught, followed by a very slow (100mph) check of the wheel brakes, steering and systems.
For me, this was the first chance to explore how the car handled on the dried mud surface of our 10-mile-long track, but that wasn't my biggest concern.
I can now admit that I've had a recurring fear, for the past 10 years, that we might have chosen the wrong desert.
While the surface of Hakskeen Pan is the best I had seen anywhere in the world, it was covered in vast quantities of stones and bisected by an old causeway road, which needed removing and grading to an accuracy that no-one had ever attempted before.
What if it proved impossible to repair the causeway? What if we missed some of the 16 million kilograms of stone debris scattered across the surface of the track?
I needn't have worried. The 300-strong team from the local communities in this area, supported by the Northern Cape Provincial Government, has done an amazing job and Bloodhound has now proved it.
The car is running really well on the surface; I can hardly feel the causeway (even at 500+ mph) and the wheels are barely scratched by the tiny bits of stone remaining on the track surface.
A massive 'Baie Dankie!' (Thank You!) to everyone who built this amazing racing surface, by hand, over the past 10 years. It's just brilliant.

Brilliant team, brilliant track
We're now deep into our test session, with a peak speed of 501 mph to date and faster runs planned.
If you want details of each run, we're publishing all the run reports on the Bloodhound website, external. As expected, we've found lots of minor problems - that's why we're here.
First up the jet engine wouldn't start, as the car wasn't feeding it enough fuel.
A quick sensor recalibration and the Rolls-Royce EJ200 screamed into life, ready to go.
The next couple of test runs worked well, then on our 4th run, accelerating through 150 mph, the jet engine suddenly shut down.
Looking at the data suggested that we had suffered a "switch bounce". The vibration in the cockpit made the contacts in the jet engine control switch "bounce" open for less than 10 milliseconds (that's one hundredth of a second).
A tiny event, but it was enough to shut the jet down.
Joe Holdsworth (our lead systems engineer, a man who dreams in computer code) quickly added some anti-bounce software to filter out momentary events like this, and the engine has been running perfectly ever since.
This is what this month's high-speed testing is all about - finding and fixing minor problems, in preparation for attacking the world land speed record next year.
Every time the car runs, we're also checking every bit of the structure, chassis, suspension, etc.
The detail in these checks has to be seen to be believed, right down to borescope inspections of wheel bearings.

Open wide and say "Aaaah"
In general, the car is standing up amazing well to the battering we're giving it.
The bottom edges of the rear suspension, known as the rear "deltas", have suffered more than most, with some bits of panel being peeled back by the debris-laden dust storm coming off the front wheels.
A minor bodywork modification (screwing and bonding some heavier gauge patches over the front corners of the deltas) has fixed the problem.
As Mark Chapman, our chief engineer, observed, if this is the worst problem we have then he will be delighted.
While we're testing the car's structure, systems and performance, I'm also learning how to control Bloodhound at ever-increasing speeds.
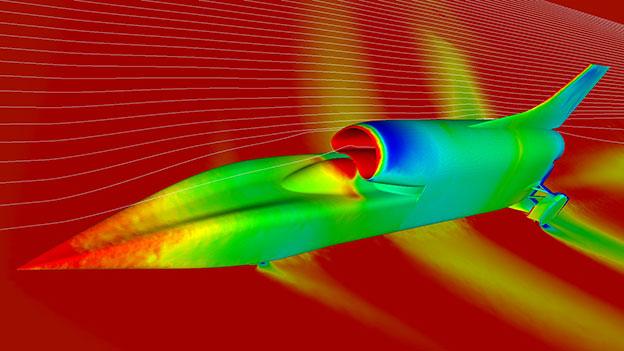
The theory suggests that as the car accelerates, the wheels will start to "plane" on the surface, like high-speed boat hulls. This will reduce the depth of the wheel tracks and reduce the lateral grip the wheels have on the dried mud surface, which is fairly slippery to start with.
Relating this to a normal road car, it might feel like driving off a snowy road and on to sheet ice. We expected that this would happen at around 300-400mph.

Minor damage
To my surprise, the predicted change in wheel grip is obvious and quite sudden. Accelerating through 200mph, I can feel the car start to move around underneath me, drifting sideways in any crosswinds.
I need to use a surprising amount of steering input, external (up to 90 degrees of lock) to keep the car running in a more-or-less straight line. The other part of the theory says that as we get faster still, the aerodynamics will take over and help to keep the car straight. I haven't seen much evidence of this so far, but I'm still hoping it will happen in the next couple of runs!
Watch the Bloodhound supercar get off the line
The steering inputs are further complicated by the size of the tail fin.
Basically, the fin is too big for the car this year, giving a "yaw static margin" (the distance between the centre of gravity and the aerodynamic centre in yaw) that is bigger than we would like.
Put more simply, the car is a bit too stable aerodynamically, so it wants to point into gusts of wind. It may sound surprising, but this is a good thing for the car at this point.
Next year, when we add the rocket pack, the centre of gravity will move back.
We've got the Nammo engineers with us in the desert right now, so I've already seen their first mock-up of the rocket motor (OK, it's only a cardboard cut-out to give an idea of size, but it's still exciting to see).
With this extra mass at the back of the car, the centre of gravity will move back and the yaw static margin will reduce. This static margin must remain positive to keep the car stable at very high speeds, so, in simple terms, the fin has to be big enough to guarantee that the car will remain "pointy end forwards" with the rocket installed.
In the meantime, having a slightly-too-big fin for high-speed testing this year makes my job a little more difficult, but it will keep the car safe next year, so I'm not going to complain.
The other major challenge has been the brake chutes. From previous experience on other vehicles (and dipping into some Nasa papers on chute testing), we know that high-speed drag chutes can be quite unstable.
Back in 1997, we spent some time modifying the chutes for Thrust SSC, to make them fly in a stable and controlled fashion behind the car. However, Bloodhound is a different car with very different aerodynamics, so we might not have the same problems.

"Exciting" steering
You can guess the next bit. Despite the very different aerodynamics, Bloodhound had exactly the same issue as last time, with the brake chute drifting backwards and forwards across the car's slipstream.
This drags the back end of the car from side to side and makes the chute deployment the most exciting (scary) bit of my day.
For our first 500mph chute test, Bloodhound's parachute team of Jon Hunt (aka "Jonny Bling") and Frantz Nehammer got the scissors out to implement a simple fix, removing a couple of the concentric rings from the outer edge of the chute canopy.
This is a well-proven route to stabilising drag chutes (Nasa did something similar to the Space Shuttle's pilot chute). To my delight it's worked perfectly, so the rest of the high-speed chute tests should be a bit less "exciting".
We've got a couple more weeks of testing to do, depending on engineering and weather conditions in the next few days.
Overall, we've been lucky with the weather, although it is a little on the warm side. With daytime temperatures up to nearly 40°C, it gets hot for the team and even hotter in the cockpit.
I haven't measured the temperature in there when the car is running, in case it puts me off, but at the end of the run when I open the cockpit hatch, the outside breeze (at over 35°C) feels like a lovely cool rush of air.
The wind is our other big limitation, with a crosswind limit of 10mph to control the yaw effects of the fin mentioned above. The wind is below this limit on most days, but last weekend we had a sandstorm which blew up in a matter of minutes.
If you've never seen one, have a look at the video, external to get an idea of life in the desert on a windy day.
The one thing I can't tell you is what the car looks like when it's running at high speed. I'm told it's amazing to watch.
Earlier this week I got a small hint of what it looks like, from our "track cam" buried in the desert surface as the car tears past at almost 500mph.
You can see a clip in the daily update video from our 491mph run, external. Enjoy!
- Published16 October 2019
- Published31 July 2019

- Published10 July 2019

- Published11 June 2019
- Published28 March 2019

- Published21 March 2019






